
Elérhetővé váltak a Galileo műholdak műszaki paramétereit leíró metaadatok
A GNSS technológia nyújtotta cm-es pontosságú helymeghatározás eléréséhez elengedhetetlen a műholdak antenna-rendszerének geometriai és fáziscentrum (PCV) paramétereinek ismerete, hiszen nem csak a földi GNSS eszközöket, de a műholdakat is egyedi paraméterezésű modellek írnak le.
A Galileo műholdas rendszer kezdeti szolgáltatásában (Initial Service) két műszaki paramétereiben eltérő műhold típus működik. Az egyik a Galileo rendszer teszt-fázisának (IOV – In-Orbit Validation) két műholdjai, illetve későbbiekben felbocsátott FOC (Full Operation Capability) műholdak.
1, A Galileo IOV és FOC műholdjainak vonatkoztatási rendszere
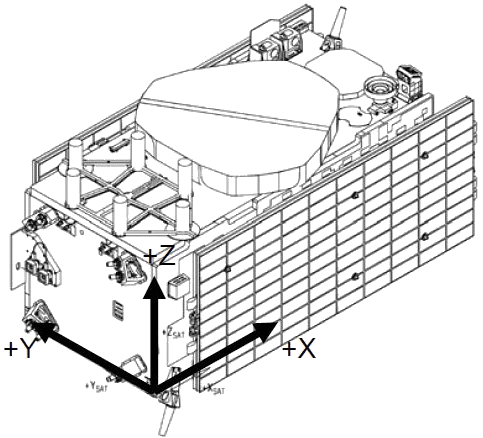
- ábra: A Galileo tesztfázisában (IOV) részt vevő műhold (GSAT01) vonatkoztatási rendszerének origója és az abból kiinduló X, Y és Z tengelyek
A különböző modulok helyének és méretének meghatározását segíti a Galileo műholdak saját vonatkoztatási rendszere (RF – Reference Frame). A fenti ábrán (1. ábra) a Galileo IOV műholdjának vonatkoztatási rendszere (jobbsodrású) látható, amelynek az origója a műhold sarkában található. Az origóból kiindulva a +X tengely a műhold testének a hosszanti tengelyével párhuzamosan fut, míg az +Y tengely ugyan abban a síkban, de az +X tengelyhez viszonyítva merőleges irányba mutat. A +Z tengely pedig a fő navigációs antennával egyazon irányban mutat.
A FOC műholdaknál (2. ábra) a fő tengelyek iránya azonos az IOV műholdakéval, azonban fontos különbség, hogy a vonatkoztatási rendszer origója nem a műszer sarkában van, hanem a felbocsátás során az adapterhez való kapcsolódásért felelős felületen, a műhold testének közepén található.
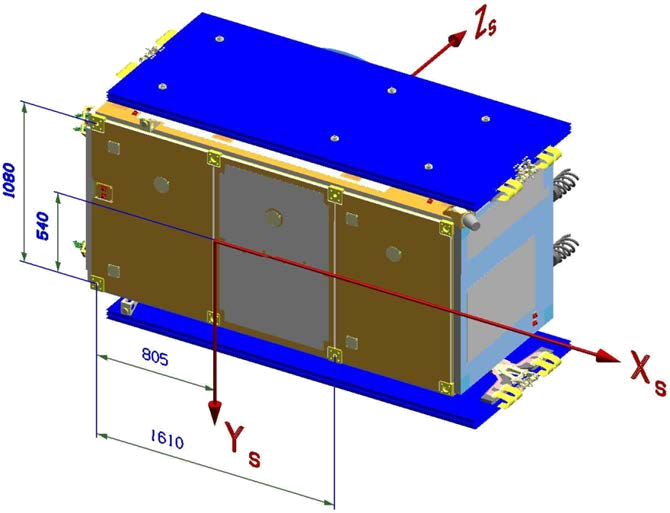
- ábra: A FOC műhold (GSAT02) vonatkoztatási rendszerének origója és az abból kiinduló X, Y és Z tengelyek
2, A Galileo műholdak irányítottsága
A Galileo műholdak Föld körüli keringésük során több pozíciókorrekciót kell végrehajtaniuk annak érdekében, hogy a fő energiaellátásukat biztosító napelemek folyamatosan a Nap felé nézzenek és a navigációs antenna egyben a Föld felé is irányuljon. Ezt a két feltételt hivatott megoldani az úgynevezett yaw-steering (3. ábra) , amely során a műhold a Z tengelye körül forog („yaw”), miközben a Nap beérkező sugaraira merőleges Y tengely elfordul. Fontos kiemelni, hogy pozícióváltásnak a további oka, hogy az óramodulnak folyamatosan a Nappal ellentétes irányba kell nézni ezzel védve a napsugárzás okozta hőmérsékleti változásoktól. A yaw-steering során változó irányszög (Ψr) meghatározására vonatkozó egyenletek elérhetők az European GNSS Service Center honlapján.
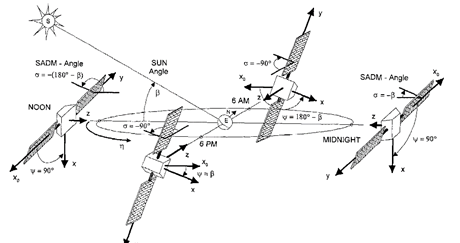
- ábra: A Nap – műhold – Föld egymáshoz viszonyított pozíciója a Galileo keringése során (Forrás: 2009 Astrium GmbH)
3, A Galileo műholdak súlyra vonatkozó paraméterei
A fő fizikai paraméterek, mint a súly és tömegközéppont (COM – Center of Mass) különbözőek az egyes Galileo műholdaknál, ráadásul a műholdak életideje során ezek változnak is, mert függnek a műholdakban tárolt, még fel nem használt üzemanyag mennyiségétől. A súlyra és a tömegközéppontra vonatkozó legfrissebb adatok a LRIS (Laser Ranging Service) honlapján érhetők el.
4, Antennára vonatkozó információk
A Galileo műholdak fáziscentrum külpontosságának (PCO – Phase Center Offset) a viszonyítási pontja az antenna referencia pontja (ARP – Antenna Reference Point), amelynek a pontos helye az IOV és FOC műholdaknál az eltérő vonatkoztatási rendszerük (Lásd: 1. pont) miatt különböző, azonban a vonatkoztatási rendszeren belül már azonos (1. táblázat). Ezzel szemben az ANTEX (ANTenna EXchange formátum) adatcsere megoldás vonatkoztatási rendszerében (2. táblázat) az antenna referencia pont a műhold tömegközéppontjához lett meghatározva, így annak pontos helye eltérő az összes Galileo műholdnál.
1. táblázat: Az antenna referencia pont (ARP) helye a műhold saját és az ANTEX vonatkoztatási rendszerében az IOV műholdak esetében
| GSAT | ARP a műhold VR-ben [mm] | ARP az ANTEX VR-ben [mm] | ||||
| X | Y | Z | X | Y | Z | |
| 0101 | 1375.50 | 600.00 | 1100.50 | -169.60 | 28.90 | 547.10 |
| 0102 | 1375.50 | 600.00 | 1100.50 | -170.20 | 28.80 | 549.10 |
| 0103 | 1375.50 | 600.00 | 1100.50 | -170.21 | 29.58 | 547.69 |
| 0104 | 1375.50 | 600.00 | 1100.50 | -170.18 | 28.96 | 548.99 |
2. táblázat: Az antenna referencia pont (ARP) helye a műhold saját és az ANTEX vonatkoztatási rendszerében a FOC műholdak esetében
| GSAT | ARP a műhold VR-ben [mm] | ARP az ANTEX VR-ben [mm] | ||||
| X | Y | Z | X | Y | Z | |
| 0201 | 140.00 | 0.00 | 1215.00 | 176.89 | -13.48 | 653.09 |
| 0202 | 140.00 | 0.00 | 1215.00 | 171.61 | -12.60 | 652.69 |
| 0203 | 140.00 | 0.00 | 1215.00 | 119.54 | -9.24 | 653.83 |
| 0204 | 140.00 | 0.00 | 1215.00 | 121.14 | -9.24 | 653.84 |
| 0205 | 140.00 | 0.00 | 1215.00 | 118.56 | -9.88 | 649.54 |
| 0206 | 140.00 | 0.00 | 1215.00 | 119.23 | -9.51 | 649.74 |
| 0207 | 140.00 | 0.00 | 1215.00 | 121.17 | -9.52 | 649.71 |
| 0208 | 140.00 | 0.00 | 1215.00 | 121.08 | -10.43 | 649.72 |
| 0209 | 140.00 | 0.00 | 1215.00 | 121.49 | -9.60 | 650.00 |
| 0210 | 140.00 | 0.00 | 1215.00 | 122.18 | -9.61 | 649.72 |
| 0211 | 140.00 | 0.00 | 1215.00 | 123.08 | -10.23 | 649.73 |
| 0212 | 140.00 | 0.00 | 1215.00 | 117.23 | -9.88 | 649.73 |
| 0213 | 140.00 | 0.00 | 1215.00 | 122.66 | -10.33 | 649.73 |
| 0214 | 140.00 | 0.00 | 1215.00 | 121.60 | -9.42 | 649.73 |
A navigációs antennák a műholdak felbocsátását megelőzően átestek egy úgynevezett süketkamrás abszolút kalibráción, amelyet a Galileo által használt mindegyik frekvencián (E1, E5 és E6) elvégeztek. A kalibráció során mesterséges navigációs jelet használva az antennát a három tengelye körül forgatva meghatározható a fáziscentrumra (PCO/PCV) vonatkozó modell adatok.
A fáziscentrum külpontossága mellett annak változásának (PCV – Phase Center Variation) az értéke is megtalálható az ANTEX fájlokban, ahol attól függően, hogy IOV vagy FOC műholdról van szó, különböző felbontásban találhatók meg a PCV értékekhez tartozó azimut és magassági szögek. Amíg az IOV műholdak esetében 181×15-ös rácshálóban 2°-os azimut és 1°-os nadír felbontásban állnak rendelkezésre a PCV értékek, addig a FOC műholdaknál kisebb 73×41-es rácshálóban és 5 °-os azimut, valamint 0.5 °-os nadír felbontás érthető el. Ezek az adatok az European GNSS Service Center (GSC) által publikált ANTEX fájlban bárki számára elérhetőek.
4, Műholdak geometriáját leíró paraméterek
A Galileo műholdak felépítése az úgynevezett „box-wing” modellel írható le, amelynek az alapja egy központi test („box”) és a hozzá csatolt két szárnyként („wing”) üzemelő napelem cellák. A műholdak Föld körüli pályájuk során csupán a központi test három oldalát (-X, -Z és +Z oldalak) éri napsugárzás. A European GNSS Service Center a központi műholdtest és a napelem panelek területe mellett azok abszorpciós (α ), tükröződési (ρ) és diffúziós tükröződési (δ) együtthatójáról is ad információt. Az említett együtthatók a műholdak üzemideje alatt változhat, így az értékük külön-külön elérhetők a műholdak életidejének az elejére (BOL – Beginning Of Life) és a végére (EOL – End Of Life) vonatkozólag is.
5, Laser Reflector (LRR) elhelyezkedése
A Galileo műholdak egyik fontos modulja a Laser Reflector (LRR), amelynek a feladata, hogy a földi műholdlézeres állomásokról érkező lézersugarat visszaverje a Föld irányába, ezzel lehetővé téve a műholdak pontos pályaadatainak a nyomon követését az akár szub-centiméteres pontossági tartományban. Az LRR fáziscentrumának a pontos helye mind a műhold, mind pedig ANTEX vonatkoztatási rendszerben meghatározott (3-4. táblázat).
3. táblázat: A LRR fáziscentrumának a pontos helye az IOV műholdaknál
| GSAT | LRR a műholfd VR-ben [mm] | LRR az ANTEX VR-ben [mm] | ||||
| X | Y | Z | X | Y | Z | |
| 0101 | 2298.00 | 595.00 | 1174.00 | -1092.10 | 33.90 | 620.60 |
| 0102 | 2298.00 | 595.00 | 1174.00 | -1092.70 | 33.80 | 622.60 |
| 0103 | 2298.00 | 595.00 | 1174.00 | -1092.71 | 34.58 | 621.19 |
| 0104 | 2298.00 | 595.00 | 1174.00 | -1092.68 | 33.96 | 622.49 |
4. táblázat: A LRR fáziscentrumának a pontos helye a FOV műholdaknál
| GSAT | LRR a műhold VR-ben [mm] | LRR az ANTEX VR-ben [mm] | ||||
| X | Y | Z | X | Y | Z | |
| 0201 | -703.00 | -27.50 | 1120.45 | 1019.89 | 14.02 | 558.54 |
| 0202 | -703.00 | -27.50 | 1120.45 | 1014.61 | 14.9 | 558.14 |
| 0203 | -703.00 | -27.50 | 1120.45 | 962.54 | 18.26 | 559.28 |
| 0204 | -703.00 | -27.50 | 1120.45 | 964.14 | 18.26 | 559.29 |
| 0205 | -703.00 | -27.50 | 1120.45 | 961.56 | 17.62 | 554.99 |
| 0206 | -703.00 | -27.50 | 1120.45 | 962.23 | 17.99 | 555.19 |
| 0207 | -703.00 | -27.50 | 1120.45 | 964.17 | 17.98 | 555.16 |
| 0208 | -703.00 | -27.50 | 1120.45 | 964.08 | 17.07 | 555.17 |
| 0209 | -703.00 | -27.50 | 1120.45 | 964.49 | 17.9 | 555.45 |
| 0210 | -703.00 | -27.50 | 1120.45 | 965.18 | 17.89 | 555.17 |
| 0211 | -703.00 | -27.50 | 1120.45 | 966.08 | 17.27 | 555.18 |
| 0212 | -703.00 | -27.50 | 1120.45 | 960.23 | 17.62 | 555.18 |
| 0213 | -703.00 | -27.50 | 1120.45 | 965.66 | 17.17 | 555.18 |
| 0214 | -703.00 | -27.50 | 1120.45 | 964.6 | 18.08 | 555.18 |
6, Hardverkésés
Hardverkésésnek azt az időtartamot nevezzük, amely során a vivőjel eljut a műhold fedélzeti oszcillátorától az antennáig. Ez az időmennyiség azonban eltérő az egyes Galileo műholdaknál (IOV – FOC) és az általuk használt frekvenciáknál (E1, E5, E6) is. Ennek a jelentősége abból adódik, hogy a műhold az adott frekvenciákon így nem ugyanabban az időpontban sugározza a jelet.
Az alábbi táblázatban bemutatásra kerül az IOV műholdakra vonatkozó jelkésleltetés az elsődleges és redundáns alrendszerben (4. táblázat) egyaránt, illetve az egyes frekvenciák között (DCB – Differential Code Bias) mért különbség (5. táblázat).
4. táblázat: Az IOV műholdaknál tapasztalható jelkésleltetés a fő és tartalék rendszernél
| GSAT | Elsődleges alrendszer [ns] | Redundáns alrendszer [ns] | ||||
| E1 | E5 | E6 | E1 | E5 | E6 | |
| 0101 | 1214.8 | 1205.1 | 1208.9 | 1215.2 | 1204.9 | 1206.7 |
| 0102 | 1218.9 | 1212.0 | 1211.2 | 1218.9 | 1212.5 | 1211.7 |
| 0103 | 3149.3 | 3146.9 | 3149.8 | 3150.3 | 3149.3 | 3150.1 |
| 0104 | 3150.1 | 3148.1 | 3148.3 | 3151.9 | 3150.7 | 3149.8 |
5. táblázat: AZ IOV műholdaknál mért DCB értéke a különböző frekvenciáknál
| GSAT | E1-E5a | E1-E5b | E1-E6 | |||
| [ns] | [m] | [ns] | [m] | [ns] | [m] | |
| 0101 | 9.71±0.38 | 2.910±0.115 | 9.77±0.32 | 2.929±0.095 | 6.32±0.37 | 1.894±0.111 |
| 0102 | 6.97±0.41 | 2.089±0.122 | 6.87±0.33 | 2.060±0.099 | 7.41±0.30 | 2.220±0.90 |
| 0103 | 2.15±0.48 | 0.644±0.144 | 2.11±0.39 | 2.634±0.117 | -0.77±0.31 | -0.230±0.094 |
| 0104 | 2.14±0.39 | 0.641±0.116 | 2.15±0.50 | 0.644±0.150 | 1.82±0.25 | 0.546±0.076 |
Forrás: gsc-europa.eu